

The "Robot Island" Problem
If you look at robotics today, you don’t see a unified industry, you see a series of isolated islands. Every company is rebuilding the wheel, trapped in a cycle of fragmented hardware and proprietary code that doesn’t talk to anything else
Modern robotics has a simple but brutal problem: everyone keeps rebuilding the same foundations from scratch.
Most teams, startups, research labs, and even large companies, end up wiring together sensors like cameras, LiDAR, IMUs, microphones, and encoders; implementing drivers and SDKs from each vendor; storing logs in custom formats or ROS bag files; and stitching everything together with one-off scripts and internal tools.
The result is that every robot becomes a self-contained island, with its own data schemas, control code, simulation setup, and deployment process.
How Fragmentation Slows Real Progress
Section titled “How Fragmentation Slows Real Progress”1. Integration becomes the bottleneck
Section titled “1. Integration becomes the bottleneck”Robotics systems rarely fail because of missing ideas. They fail because of integration friction.
- Sensors emit incompatible formats.
- Adding or replacing hardware often requires rewriting large portions of glue code.
- Simulation and real-world deployments rarely share a consistent data layer, so behaviors that work in simulation break once deployed.
Across both internal experience and industry studies, roughly 70% of robotics development time is spent on integration and maintenance, not on improving intelligence or behavior.
2. Improvements don’t travel
Section titled “2. Improvements don’t travel”Robots do learn, but their learning is isolated.
- A warehouse arm refines a grasping strategy.
- A drone discovers safer inspection paths.
- A humanoid improves balance in crowded environments.
These improvements are typically locked inside custom logs, proprietary codebases, one-off internal stacks
Transferring that knowledge to another robot, or even another team, is often harder than retraining from scratch. As a result, progress resets instead of compounding.
3. Only a few teams can build end-to-end platforms
Section titled “3. Only a few teams can build end-to-end platforms”A small number of organizations can overcome this fragmentation.
Large players with deep resources can:
- Deploy massive fleets
- Collect large-scale real-world datasets
- Build tightly integrated perception, planning, and control stacks
Most teams cannot operate at this level. The outcome is a long tail of capable builders repeatedly reconstructing the same infrastructure, without any shared layer where improvements accumulate.
What a Shared Foundation Must Enable
Section titled “What a Shared Foundation Must Enable”Breaking this pattern requires more than better models or faster hardware. It requires a common execution foundation.
That foundation must support:
- A unified way to ingest and structure data from sensors, logs, and simulations
- A standard method to express skills and behaviors independent of hardware
- A runtime capable of executing those skills safely across diverse machines
- A feedback loop where experience from one deployment improves others using similar capabilities
CodecFlow is designed specifically around these requirements:
- A unified data layer and connectors library that standardize how robots consume and produce data
- Perception and planning abstractions that decouple intelligence from sensor and hardware differences
- An Operator runtime that executes skills with real-time feedback and safety constraints
- A roadmap toward shared Operators, and eventually, reusable skill and data marketplaces
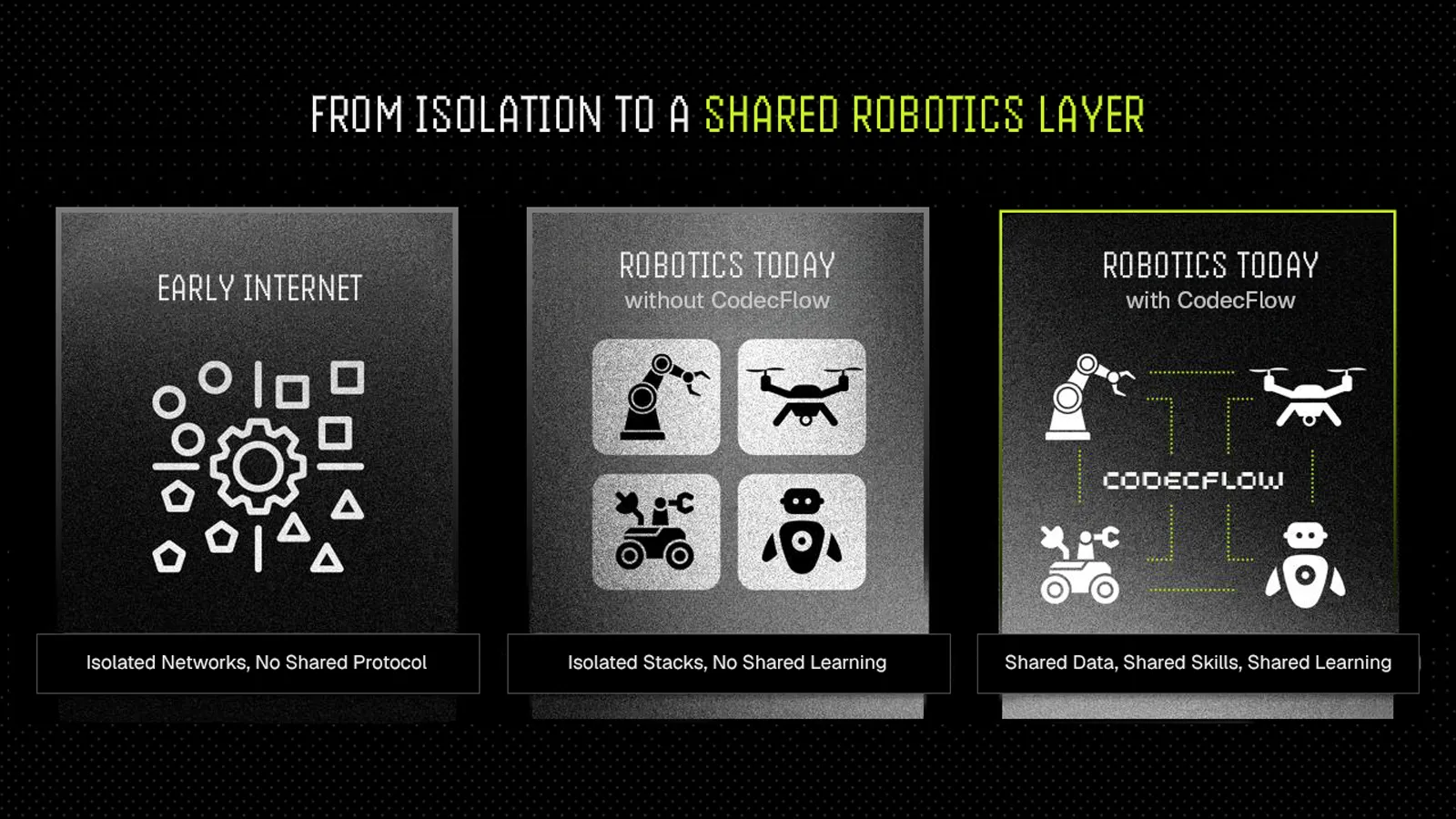
The goal is not to replace innovation, but to ensure it compounds.
To break free from these islands, we need more than just better hardware. We need a shared execution layer that allows intelligence to flow seamlessly from one machine to the next. We need CodecFlow.